Derrière cette phrase de Theodore Roosevelt, codée en binaire dans les motifs d’un parachute, se cache un exploit technique impressionnant.
Le 18 février dernier à 20h44 TU, le rover Perseverance s’est posé sur Mars dans le cratère Jezero. Certes, ce n’est pas une première technologique car d’autres l’ont déjà fait par le passé. Mais ce dernier est le plus imposant jamais envoyé sur la planète rouge et ses objectifs scientifiques sont ambitieux.
La séquence d’« atterrissage », l’EDL (Entry, Descent and Landing), est d’une grande complexité technique. La NASA l’a nommée « les 7 minutes de terreur ». Pourtant le robot s’est posé à seulement 1,2 km du centre de la zone prévue !
Comment a-t-il réussi ? Grâce à des programmes d’intelligence artificielle.
Rovers sur Mars : 25 ans d’histoire
Quatre rovers ont précédé Perseverance sur Mars.

Mars Pathfinder
Sojourner, petit robot mobile libéré par Mars Pathfinder en 1997, était considéré comme un démonstrateur technologique. En effet, avec ses 10,6 kg, sa petite taille de 65 cm par 48 cm et une hauteur de 30 cm, les objectifs scientifiques étaient limités.
La technique d’atterrissage est un peu rude. En dehors des classiques (bouclier thermique, parachute et rétrofusées), l’appareil se pose en utilisant un système d’airbag et il rebondit plusieurs fois avant de se stabiliser.

Pour les déplacements, le rover dispose de deux modes de fonctionnement : réception d’une séquence depuis la Terre après analyse des images du terrain et une navigation autonome en analysant les signaux de ses capteurs laser, lui permettant ainsi d’éviter les obstacles.
Mars Exploration Rover
Spirit (Mars Exploration Rover – A) n’a parcouru que 7,73 km entre 2004 et 2010, le sable ayant eu raison de sa progression. Opportunity (MER-B), quant à lui, s’est lancé dans un véritable marathon de 45,16 km mais à vitesse d’escargot entre 2004 et 2018. Les deux frères jumeaux pèsent environ 180 kg et sont d’une taille modeste (1,6 m de long pour 2,3 m de large et 1,5 m de hauteur).
Ils reprennent le principe d’atterrissage déjà testé avec Sojourner. On retrouve donc plus ou moins les mêmes mécanismes et les mêmes programmes mais améliorés.
Grande première, dans le cadre du programme Watch, Opportunity a pu photographier des éléments atmosphériques singuliers sans en avoir reçu l’ordre.
Mars Science Laboratory
Curiosity, avec ses 899 kg sur la balance, a repris le flambeau depuis août 2012. Cette fois, il s’agit d’un engin beaucoup plus gros (3 m de long pour 2,70 m de large et 2,2 m de hauteur) embarquant 75 kg d’instruments.
La procédure d’atterrissage est également beaucoup plus complexe car il faut pouvoir amener le rover à la surface de Mars en parfait état. La NASA a donc mis au point une nouvelle version de l’EDL.
Le système d’airbag est remplacé par le Sky Crane qui assure la descente lente et contrôlée du rover. Cet appareil équipé de rétrofusées stabilise le rover juste avant de le déposer sur le sol. Une fois la tâche accompli, il s’éloigne pour s’écraser le plus loin possible du site d’atterrissage.
Au début de sa mission, Curiosity était totalement piloté par l’équipe terrestre. Mais en 2013, une nouvelle fonctionnalité de navigation autonome a été ajoutée. Même si l’être humain reste présent dans le processus, l’AutoNav (Autonomous Navigation) utilise les différentes caméras du rover et autres capteurs puis combine ces informations pour définir un cap et un chemin sûr que le rover pourra parcourir. Ce nouveau programme permet des déplacements « plus rapides ».
Grâce au système AEGIS (Autonomous Exploration for Gathering Increased Science), Curiosity est également doté, depuis mai 2016, d’un algorithme capable de sélectionner les cibles prioritaires à analyser par la Chem-Cam, son instrument de spectrométrie géochimique embarqué.
Dernière génération
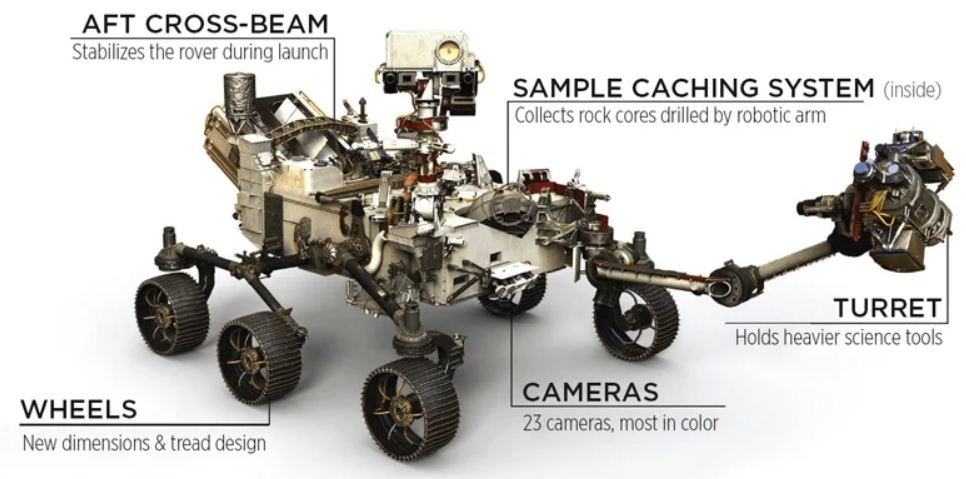
Forte de toutes les expériences passées, la NASA a donc envoyé le rover Perseverance sur Mars. Il est un peu plus lourd que Curiosity (1025 kg) mais il conserve néanmoins les mêmes proportions que son prédécesseur.
Atterrissage
L’EDL a encore été amélioré. Le Sky Crane est toujours utilisé mais il est couplé à un système permettant d’observer et de contrôler la descente, en évaluant en temps réel sa position par rapport au lieu d’atterrissage.
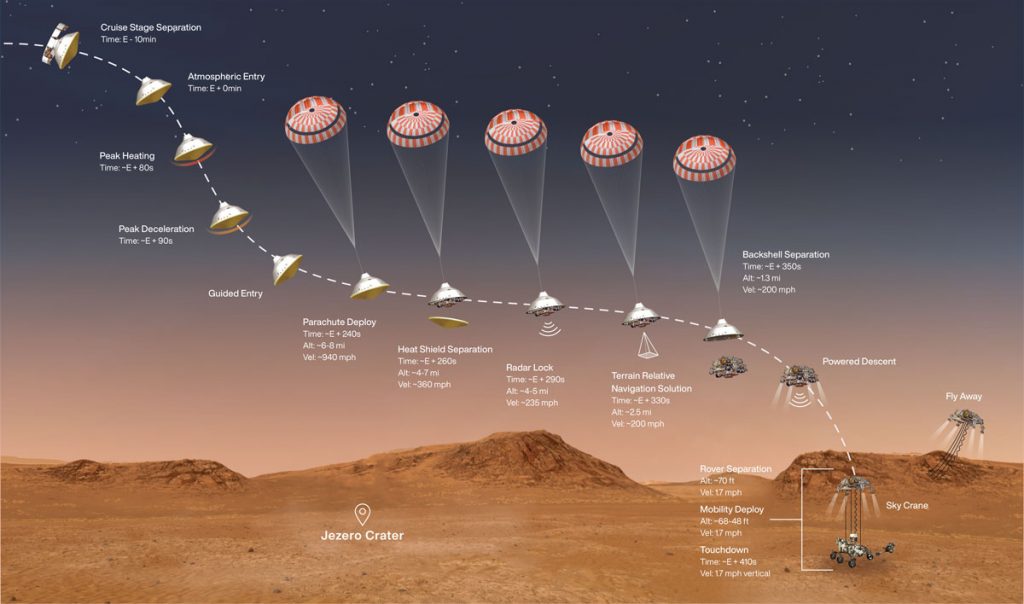
Cette nouvelle technologie s’appelle Terrain-Relative Navigation et s’appuie sur une caméra spéciale pour identifier rapidement les caractéristiques de la surface. Puis le programme les compare à une carte embarquée pour déterminer exactement où le Sky Crane se dirige.
Même si les cartes sont précises, ce genre d’atterrissage comporte toujours des aléas. Ainsi l’engin peut choisir l’endroit le plus sûr qu’il peut atteindre et effectue les corrections nécessaires de trajectoire jusqu’à la libération du rover sur le sol.
Architecture interne
Perseverance est équipé de deux ordinateurs identiques ou RCE (Rover Compute Elements). Ainsi, en cas de défaillance, il y a toujours un cerveau de rechange qui peut être réveillé pour prendre le contrôle et continuer la mission.
Le RCE s’interface avec les différents organes du rover pour contrôler tous les instruments mobiles et pour exécuter les diverses commandes. Il enregistre en outre les informations des capteurs comme la température et les niveaux de puissance pour maintenir le rover dans son état nominal.
Une boucle de contrôle principale vérifie en permanence les systèmes pour s’assurer que l’engin est à la fois capable de communiquer tout au long de la mission de surface et qu’il reste thermiquement stable (ni trop chaud ni trop froid) à tout moment. Des ajustements sont effectués le cas échéant.
Le RCE peut ainsi décider quelles nouvelles activités peuvent être lancées ou achevées. Enfin, il programme et prépare les sessions de communication avec la Terre ou avec les orbiteurs locaux de Mars.
Cela permet une utilisation plus efficace et autonome de l’énergie électrique et des autres ressources du rover. Par exemple il peut décaler l’heure de certaines activités dans le calendrier des opérations quotidiennes.
Perseverance génère constamment de nouvelles données (télémétrie, maintenance, analyse, rapports d’événements, etc) qui sont stockées pour une éventuelle transmission si l’équipe sur Terre le demande.
Déplacements
En plus de la conduite pilotée par un opérateur sur Terre après réception des images du terrain, il est aussi possible d’utiliser un mode de conduite en aveugle. Le rover exécute une suite d’instructions sans aucun ajustement.
Une autre méthode couramment utilisée en robotique est l’odométrie visuelle (Visual Odometry) du grec hodos (voyage) et metron (mesure). Elle implique essentiellement que le rover prenne des photos à intervalles réguliers (environ tous les mètres) puis les compare aux images précédentes pour voir où il s’est déplacé et comment le terrain a changé.
Enfin, on retrouve la technologie d’AutoNav (Autonomous Navigation) déjà testée avec succès lors des missions précédentes. En utilisant les caméras et les capteurs embarqués, le rover peut se construire une représentation de son environnement et tracer de manière autonome des chemins sûrs.
L’image composite développée ressemble à l’image ci-dessous, les différentes couleurs indiquant un terrain sûr (vert) ou dangereux (rouge).
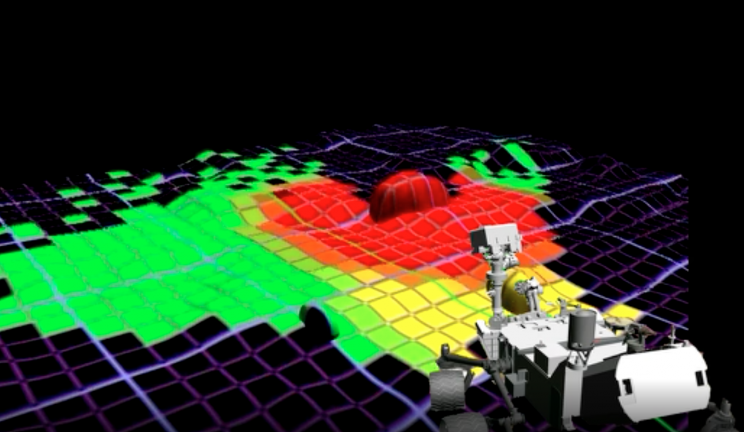
Le logiciel de conduite confère à Perseverance une plus grande indépendance que Curiosity. Cela lui permet de couvrir plus de terrain sans consulter fréquemment les contrôleurs sur Terre.
Pour assurer l’équilibre et le positionnement du rover, une unité de mesure inertielle (IMU) fournit des informations sur 3 axes de sa position, ce qui lui permet d’effectuer des mouvements verticaux, horizontaux et latéraux (lacet) précis.
L’appareil est utilisé dans le processus de navigation pour prendre en charge les traversées en toute sécurité et pour estimer le degré d’inclinaison du robot à la surface de Mars.
Drone hélicoptère
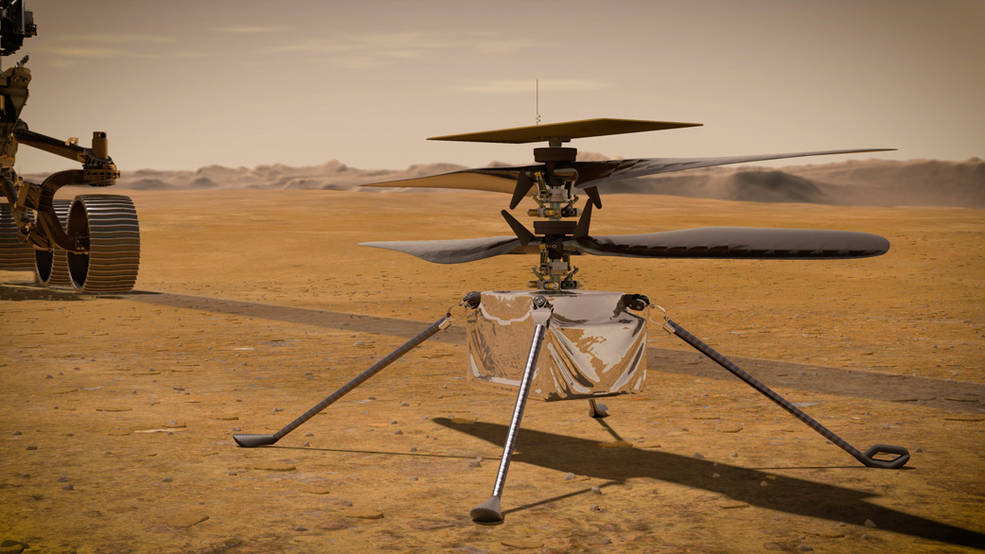
Enfin Perseverance emporte Ingenuity (Ingéniosité), un petit hélicoptère conçu pour résister aux conditions difficiles de la Planète Rouge. Il restera stocké pendant quelques mois, le temps que le rover atteigne un site propice à son déploiement. Un mécanisme permettra alors de le déposer au sol avant que Perseverance ne s’éloigne pour qu’il puisse décoller.
En outre, il ne sera pas possible de contrôler le vol en temps réel, les temps de communication étant définitivement incompatibles avec ce type de manœuvre. Les commandes seront envoyées en avance.
Cependant, Ingenuity disposera de l’autonomie nécessaire pour prendre ses propres décisions et adapter son plan de vol. Ce sera une grande première technique qui ouvrira la voie à un nouveau modèle d’exploration extraterrestre.
Toujours plus d’images à traiter
Les différents repérages sur Mars ont été également facilités par les images transmises depuis 2006 par la sonde Mars Reconnaissance Orbiter (MRO). Elles ont été produites par les caméras CTX (Context Imager) et HiRISE (High Resolution Imaging Science Experiment).
Ces clichés sont ainsi analysés scrupuleusement par les équipes du JPL (Jet Propulsion Laboratory) afin de détecter des changements à la surface de la planète rouge. Malheureusement, chaque photo demande environ 40 minutes d’analyse par un scientifique confirmé.
Pour accélérer ce travail titanesque, la NASA a développé COSMIC (Capturing Onboard Summarization to Monitor Image Change) pour classer automatiquement les cratères d’impact récents.
L’apprentissage a été effectué à partir de près de 7000 images issues de la caméra CTX. Ensuite l’IA, qui est exploitée sur les ordinateurs du JPL, a été testée sur un ensemble de 112 000 images. Le résultat est sans appel : Là où un être humain a besoin de 40 minutes pour analyser un cliché, l’IA ne met que 5 secondes.
Et maintenant ?
Quelle formidable aventure nous allons vivre avec Perseverance ! Et quel démonstrateur pour les techniques d’Intelligence Artificielle !
En tout cas, quoi qu’il advienne, l’expérience accumulée permettra de mieux préparer des missions de plus en plus ambitieuses et automatisées. Les engins seront de plus en plus autonomes pour prendre les meilleures décisions afin de satisfaire leurs objectifs.
Personnellement, j’attends avec beaucoup d’impatience le premier vol de l’hélicoptère. J’espère que tous les systèmes fonctionneront bien et que nous aurons de nouvelles belles images de ce paysage désertique, inhospitalier et lointain mais ô combien envoûtant.